Home
Motion Coordination And Control Of A Multi-Robot System: SIMULINK-Webots Cosimulation
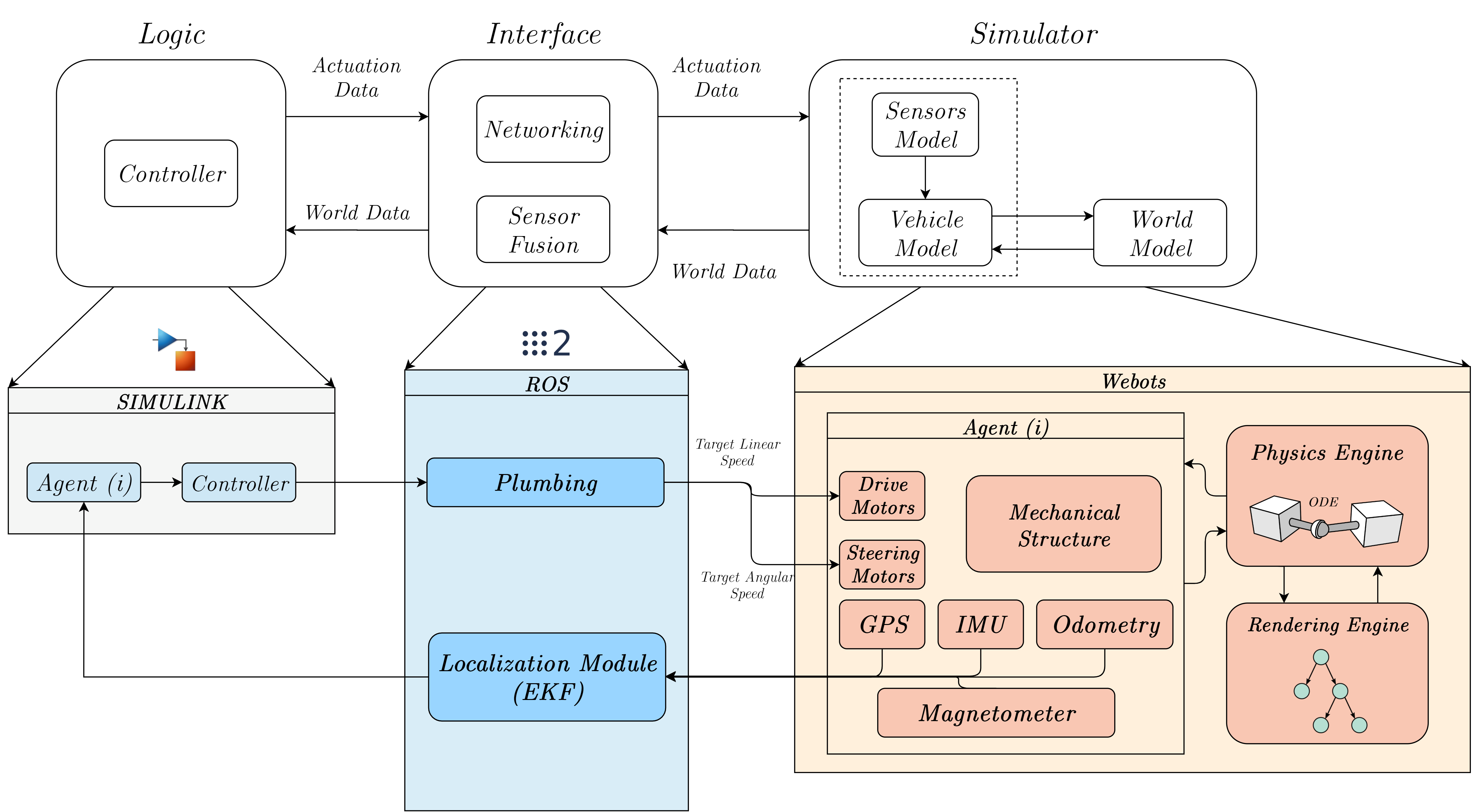
Here's the simulation architecture:
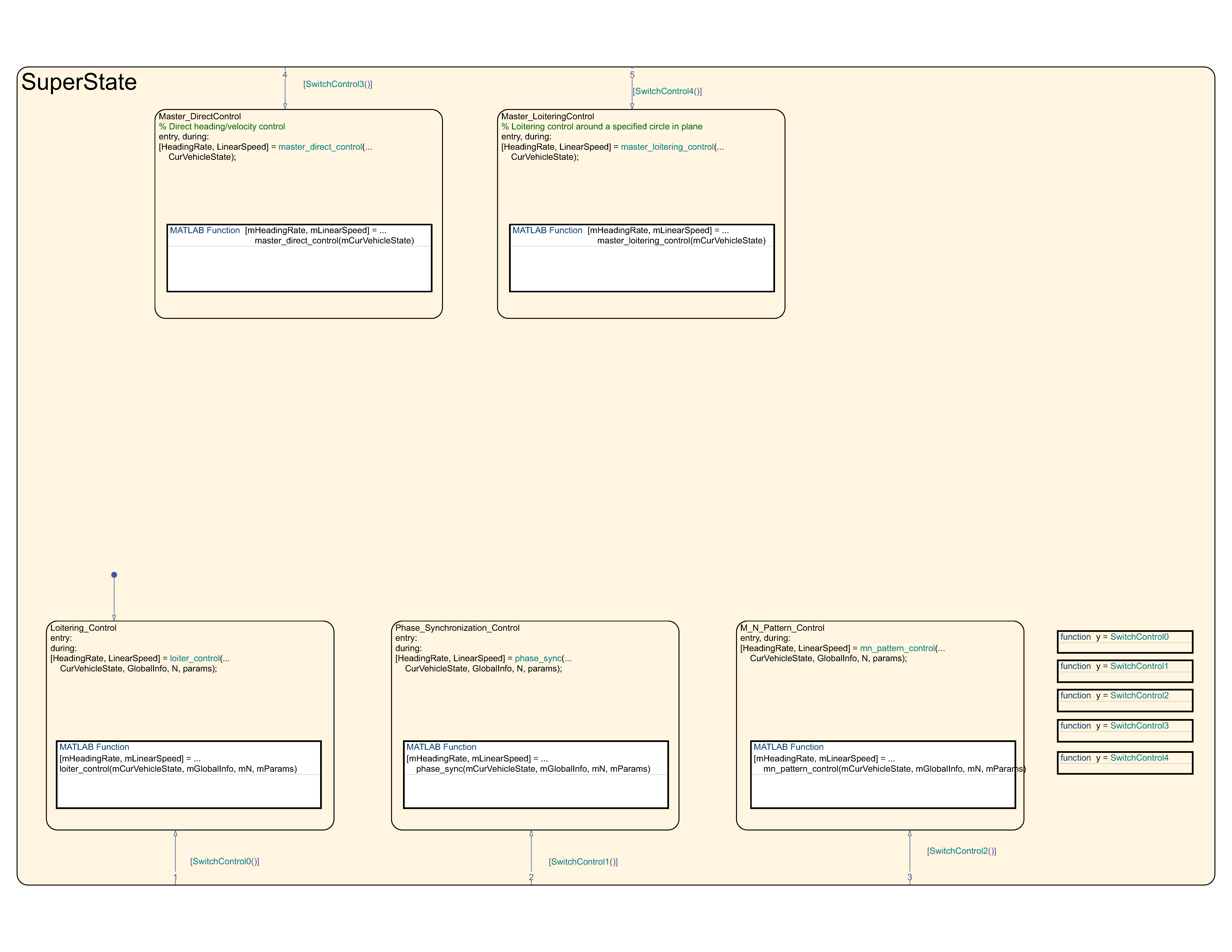
We have a library of controllers that generate predefined motions patters for the fleet:
Some the motion patterns:
The desired pattern is selected based on the policies and decisions made by a higher-level controller that supervises the operation of the group. The colored box of the following diagram is addressed in this project.
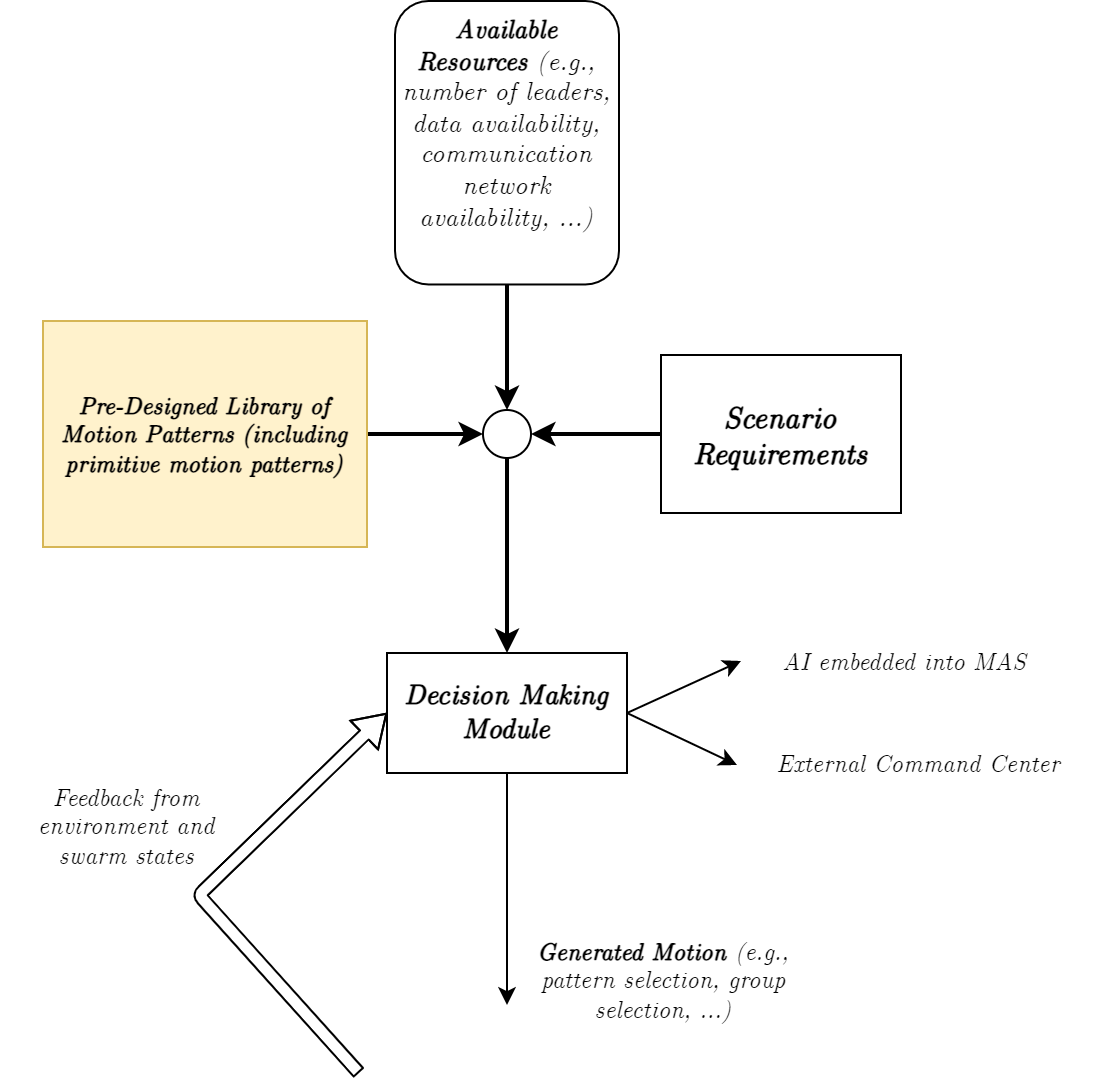
Mission is specified by the user: